Architecture
Lego Mindstorms NXT
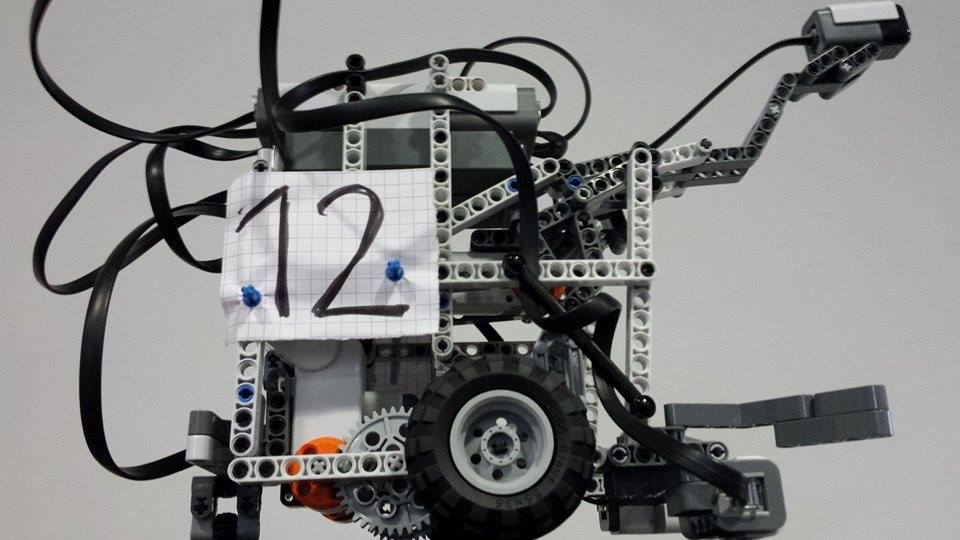
- Our robot from side

- Our robot from front-side
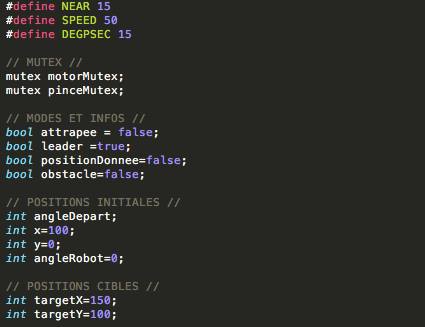
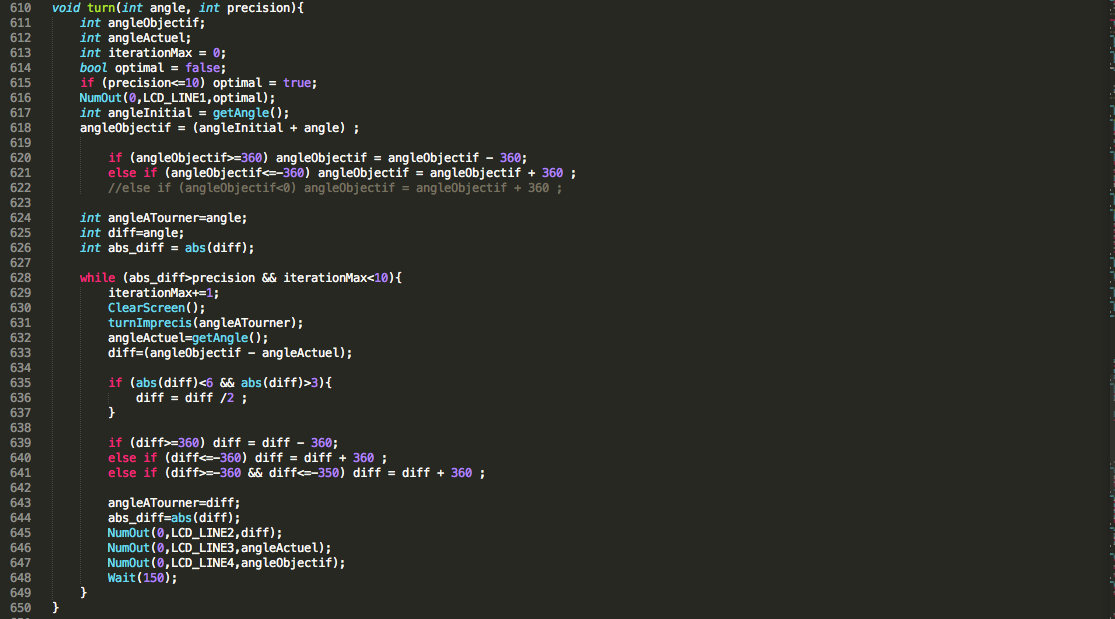
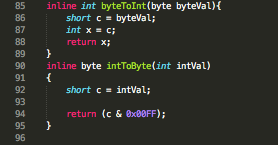
Basic variables
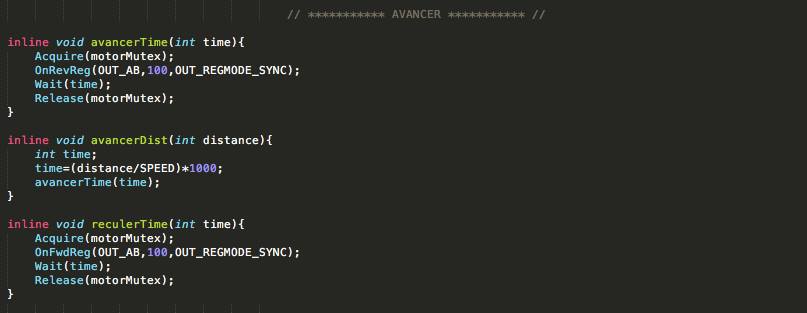
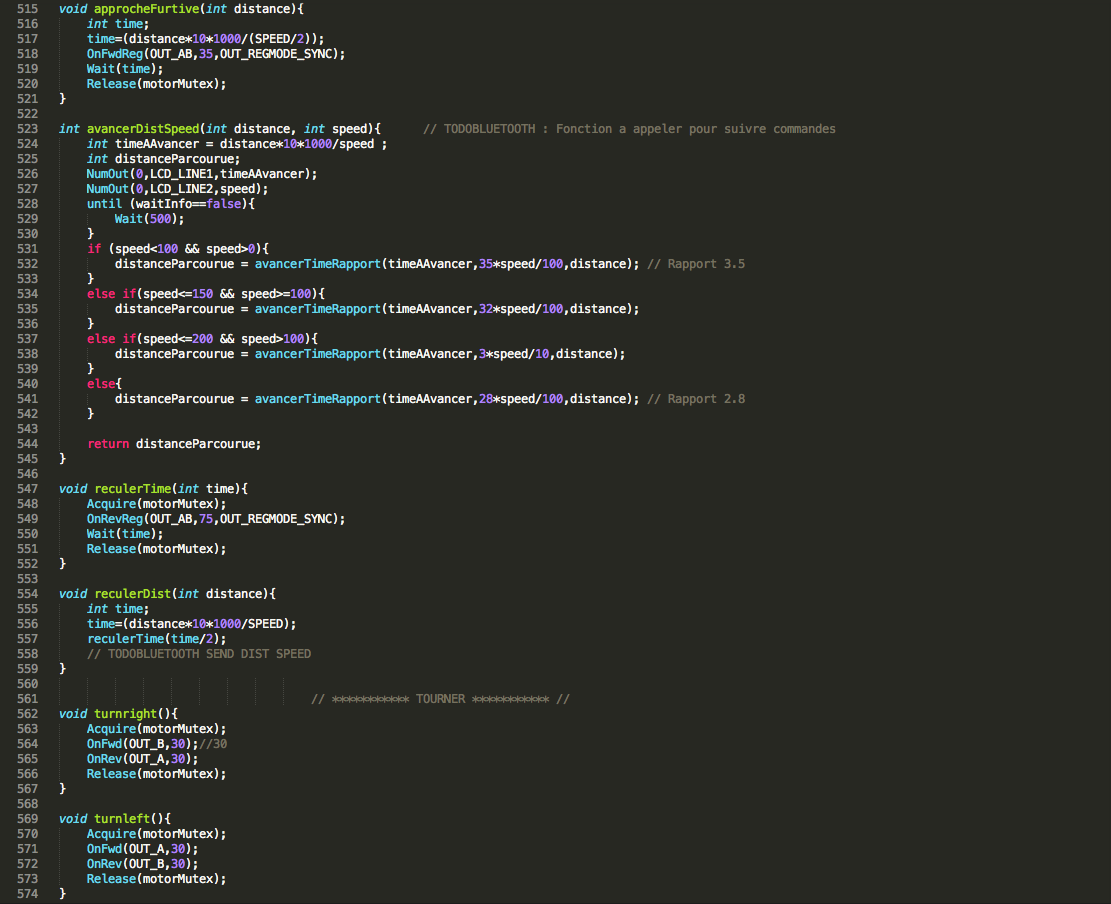
Moving functions
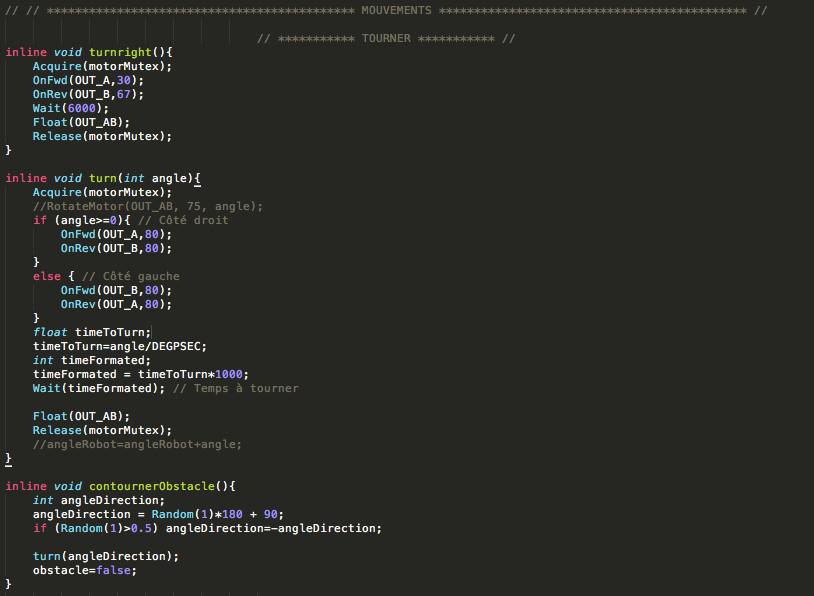
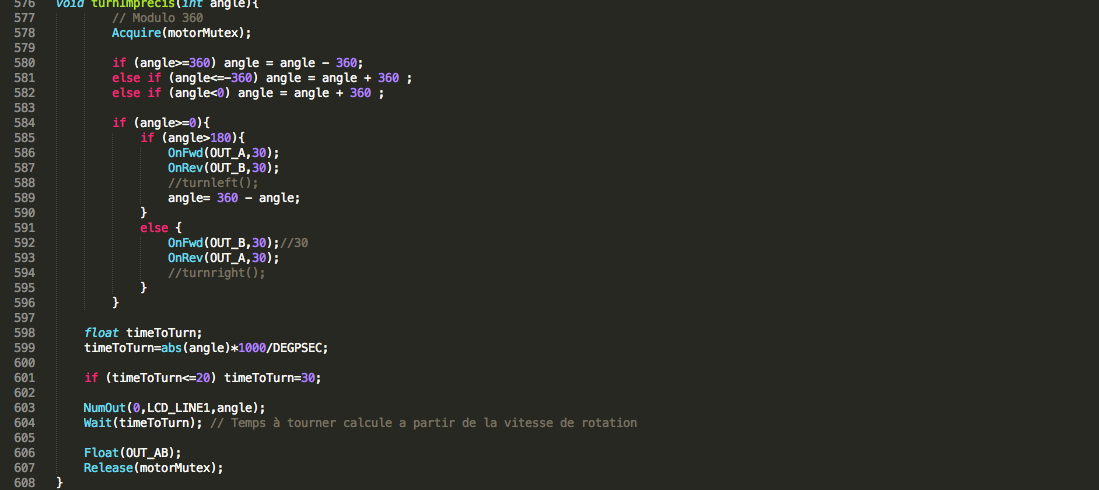
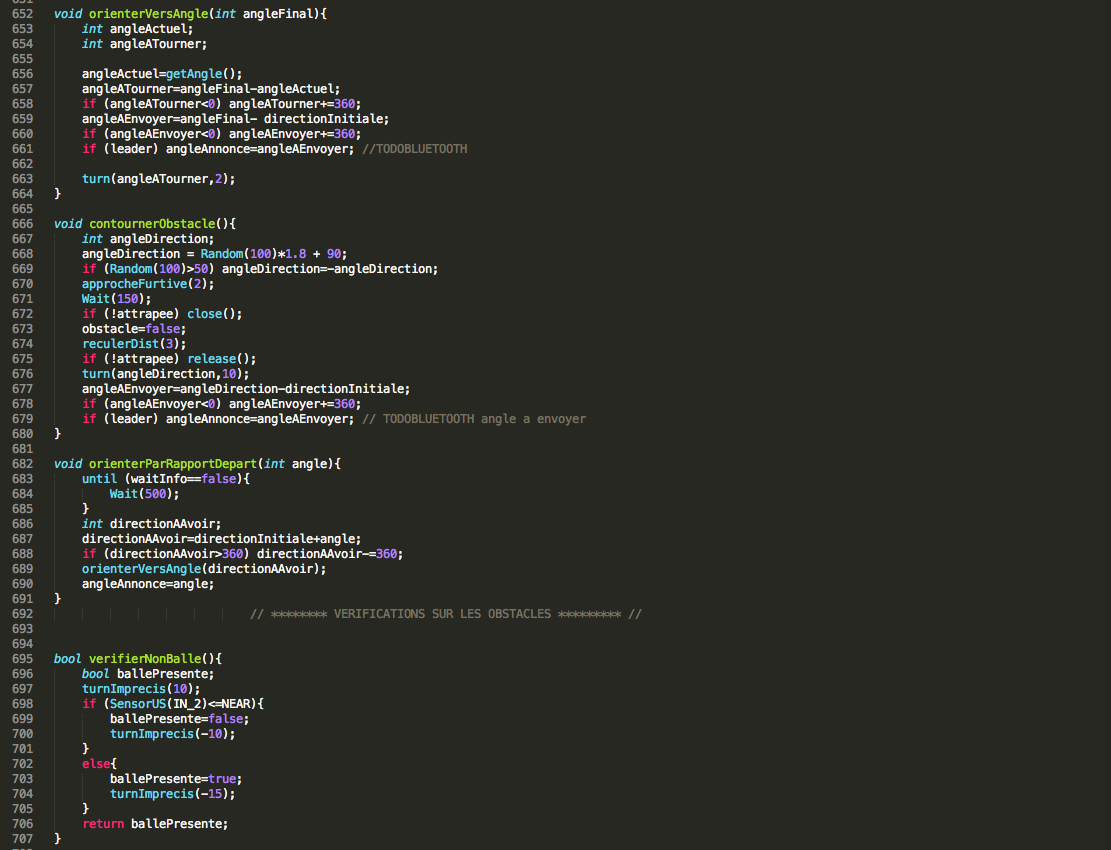
Orientation functions
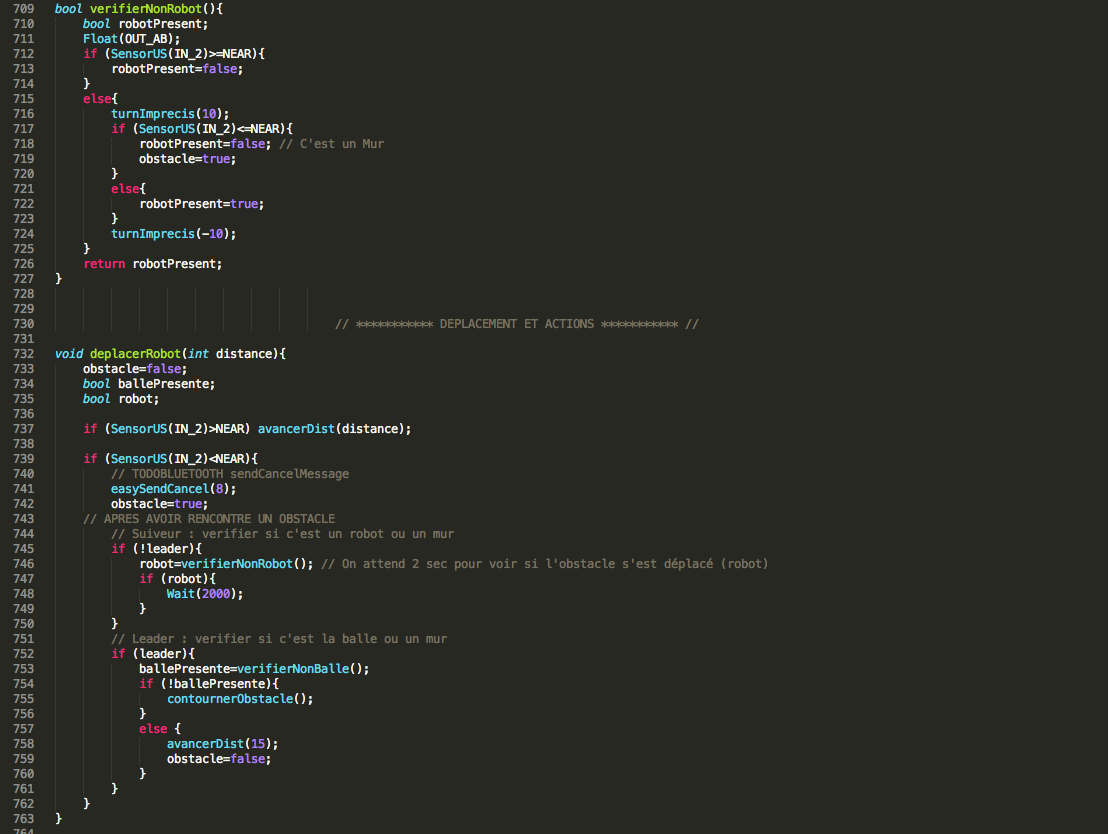
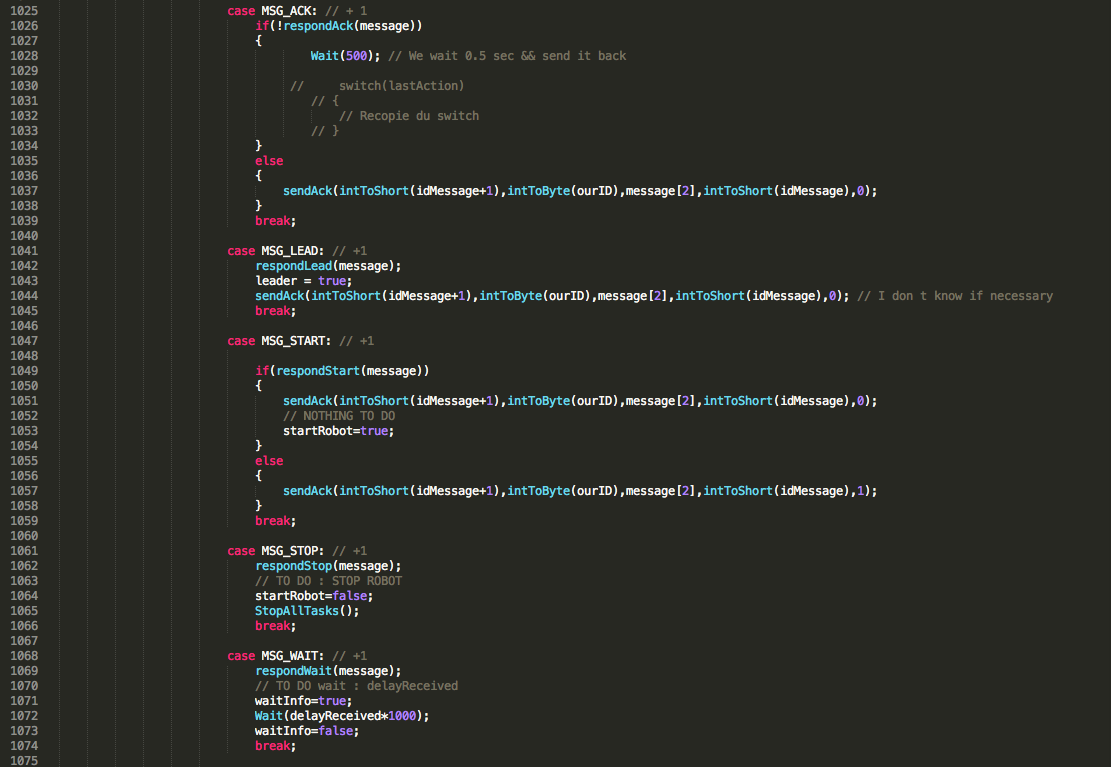
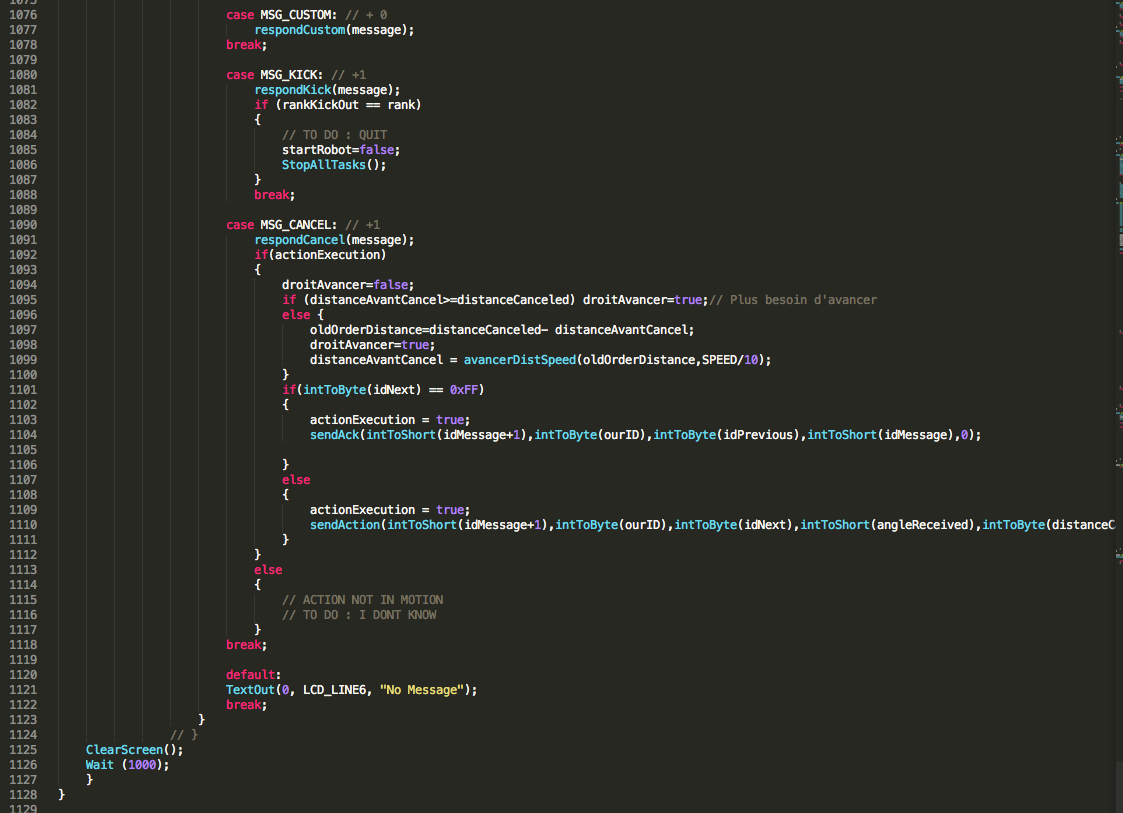
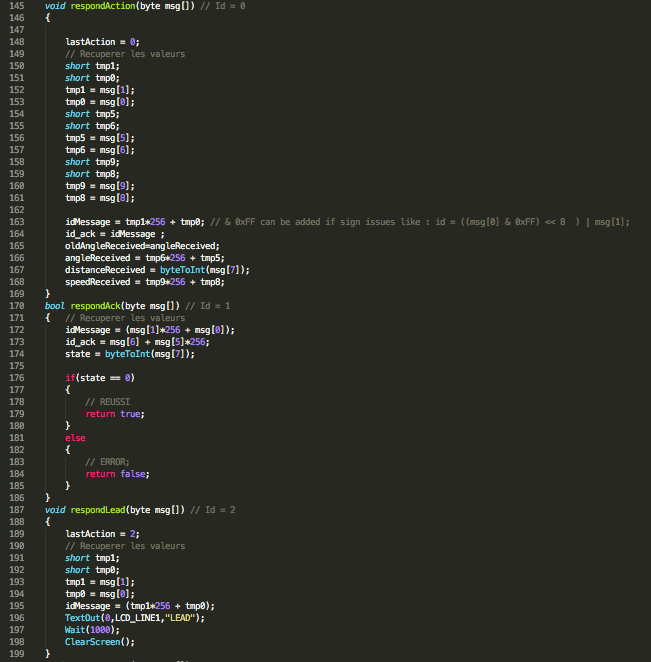
Switch Handling
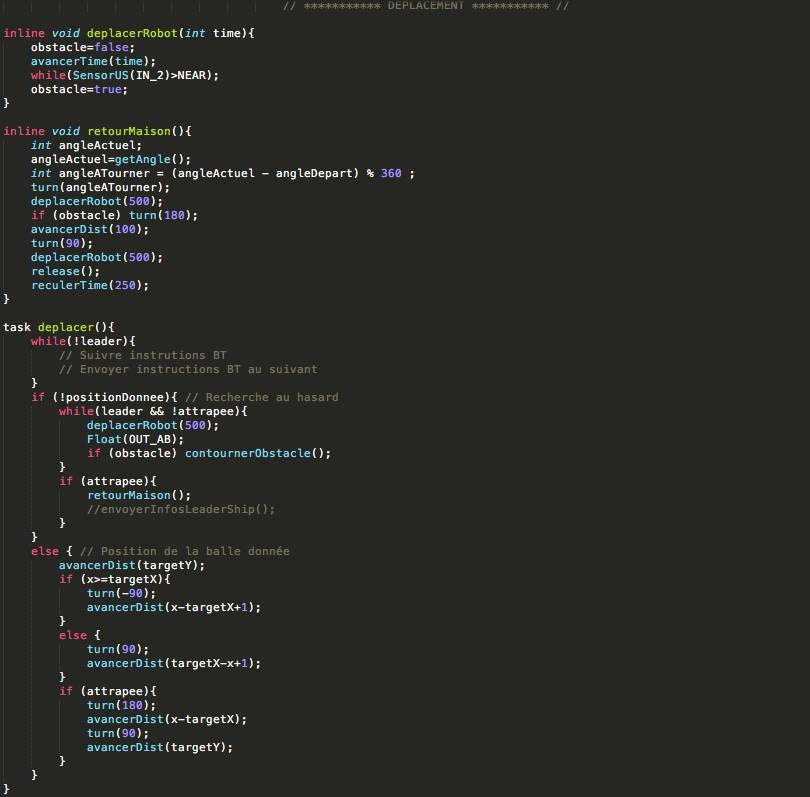
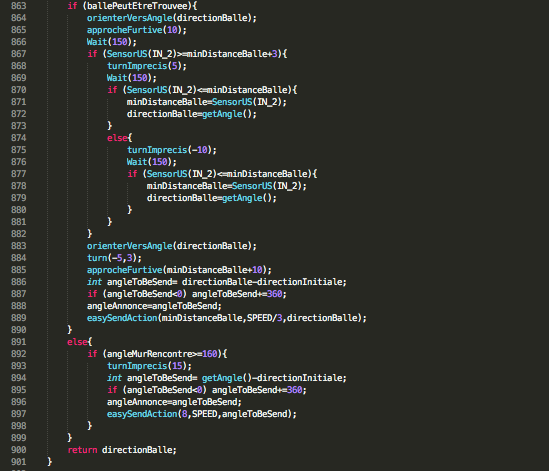
Where is it ?
As a Follower
As a Leader

Robot Designer

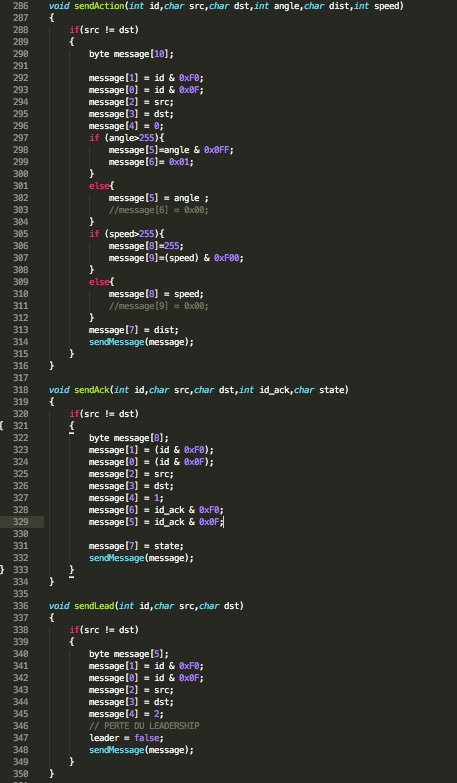
Bluetooth Developer

Architecture Developer